

Guide on Linear Transformations in Linear Algebra
Start your free 7-days trial now!
Linear transformations
A linear transformation is a transformation $T:\mathbb{R}^n\to\mathbb{R}^m$ that satisfies the following two properties:
additive property: $T(\boldsymbol{v}+\boldsymbol{w})=T(\boldsymbol{v})+T(\boldsymbol{w})$ for all $\boldsymbol{v},\boldsymbol{w}\in\mathbb{R}^n$.
homogeneity property: $T(k\boldsymbol{v})=k\cdot{T(\boldsymbol{v})}$ for all $\boldsymbol{v}\in\mathbb{R}^n$ and $k\in\mathbb{R}$.
Functions as linear transformation
Suppose $f:\mathbb{R}\to\mathbb{R}$ is defined by $f(x)=5x$. Show that $f$ is a linear transformation.
Solution. Since functions transform the input $x$ into some output $y$, functions can also be treated as transformations. To prove that a function is a linear transformation, we must check that the function possesses the additive and homogeneity properties.
For any value $x$ and $y$ in $\mathbb{R}$, we have:
This means that $f$ satisfies the additive property.
We now check for the homogeneity property:
Since both criteria are satisfied, $f(x)$ is a linear function.
Non-linear transformation
Consider the following transformation $T:\mathbb{R}^2\to\mathbb{R}^2$ defined below. Is this a linear transformation?
Solution. Let's check for the homogeneity property:
Since $T$ does not satisfy the homogeneity property, $T$ is not a linear transformation. Note that the $+2$ term is what makes $T$ non-linear. If the $+2$ was replaced by say $3x_2$, then $T$ would be a linear transformation.
Linear transformations map the zero vector to the zero vector
If $T:\mathbb{R}^n\to\mathbb{R}^m$ is a linear transformation, then:
Any transformation that does not satisfy this must be non-linear. Note that the converse is not true, that is, $T(\boldsymbol{0})=\boldsymbol{0}$ does not necessarily imply that $T$ is linear. We will see an example of this shortly.
Proof. If $T$ is a linear transformation, then the homogeneity property must hold for any scalar $k$, that is:
Let's set $k=0$ to get:
This completes the proof.
Showing that a transformation is non-linear
Consider the following two functions below. Are they linear transformations?
Solution. We can use theoremlink to easily check if $f_1$ is non-linear:
This means that $f_1$ is not linear. This may be mind-blowing 🤯 since we all know that $f_1$ is an equation of a straight line. $f_1$ is indeed a linear equation, but $f_1$ is not considered a linear transformation in the world of linear algebra.
Let's now check the linearity of $f_2$ by first using theoremlink:
Unlike $f_1$, we have that $f_2$ satisfies theoremlink. However, we still cannot conclude that $f_2$ is linear - theoremlink only tells us that a transformation is non-linear if $T(0)\ne{0}$. We must check the two defining properties once again - let's check the homogeneity property:
Since the homogeneity property is not satisfied, we conclude that $f_2$ is not a linear transformation.
Linear transformation as matrix-vector product
Let $T:\mathbb{R}^n\to\mathbb{R}^m$ be a linear transformation. $T$ can be expressed as a matrix-vector product:
Where $\boldsymbol{x}$ is a vector in $\mathbb{R}^n$ and $\boldsymbol{A}$ is an $m\times{n}$ matrix.
Proof. Any vector $\boldsymbol{x}$ can be expressed as a linear combination of $n$ standard basis vectors $\boldsymbol{e}_1,\boldsymbol{e}_2,\cdots,\boldsymbol{e}_n$ like so:
Let's apply a linear transformation $T$ on both sides to get:
Since $T$ is a linear transformation, we can use the additive and homogeneity properties to get:
Here, note the following:
the second-to-last step used theoremlink to rewrite the linear combination using a matrix-vector product.
$\boldsymbol{A}$ is an $m\times{n}$ matrix whose columns are the transformed standard basis vectors $T(\boldsymbol{e}_1)$, $T(\boldsymbol{e}_2)$, $\cdots$, $T(\boldsymbol{e}_n)$.
This means we can convert any linear transformation to a matrix-vector product by applying the transformation to the standard basis vectors! This completes the proof.
Writing a transformation as a matrix product
Consider the linear transformation $T:\mathbb{R}^2\to\mathbb{R}^3$ below:
Write the transformation in matrix-vector product form.
Solution. The standard basis vectors for $\mathbb{R}^2$ are:
Applying transformation $T$ on these basis vectors yields:
By theoremlink, the linear transformation can be expressed as:
Geometric interpretation of matrix transformation
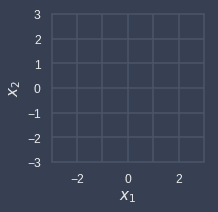
Geometrically, a transformation can be interpreted as an operation that changes the position of the input. For instance, consider the following grid:
Now, consider the following linear transformation:
By applying this transformation to all the data points over the grid lines, we end up with the following result:
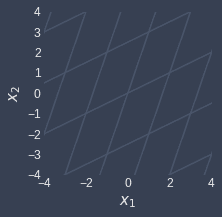
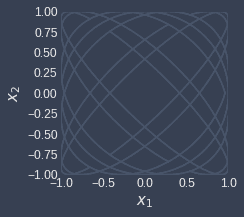
Notice how the grid lines are still straight and parallel - this is guaranteed because $T$ is a linear transformation. In contrast, consider a non-linear transformation like so:
Transforming our grid lines will result in non-straight non-parallel lines:
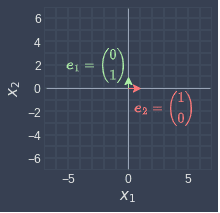
Let's now see what happens to the standard basis vectors after a linear transformation:
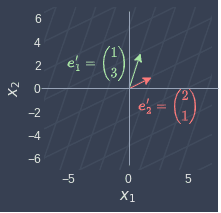
Notice how the transformed vectors are actually just the columns of the transformation matrix! Let's define $\boldsymbol{e}'_1$ and $\boldsymbol{e}'_2$ as the transformed standard basis vectors, that is:
$\boldsymbol{e}'_1=T(\boldsymbol{e}_1)$
$\boldsymbol{e}'_2=T(\boldsymbol{e}_2)$
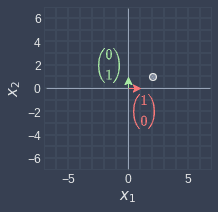
Let's visualize the standard basis vectors before and after the transformation:
Standard basis vectors before $T$ | Standard basis vectors after $T$ |
|---|---|
| 
|
Now, suppose we focus on a single point:
Let's visualize this point:
Point before $T$ | Point after $T$ |
|---|---|
| 
|
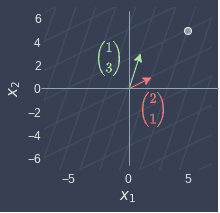
Here, we can make the following observations:
before the transformation - we see that $\boldsymbol{x}$ can be represented using 2 $\color{red}\boldsymbol{e}_1$ and 1 $\color{blue}\boldsymbol{e}_2$.
after the transformation - we see that $T(\boldsymbol{x})$ can be represented using 2 $\color{red}e_1'$ and 1 $\color{green}\boldsymbol{e}_2'$.
The key here is that the point $\boldsymbol{x}$ is represented using the same linear combinations of the standard basis vectors before and after the transformation.
Let's also verify this mathematically. We can express $\boldsymbol{x}$ using the standard basis vectors:
This tells us that $\boldsymbol{x}$ can be represented using two $\boldsymbol{e}_1$ and one $\boldsymbol{e}_2$.
Let's now transform $\boldsymbol{x}$ to get:
This tells us $T(\boldsymbol{x})$ can be represented using two $\boldsymbol{e}'_1$ and one $\boldsymbol{e}'_2$.
Finding the transformed standard basis vectors
Consider the linear transformation $T:\mathbb{R}^3\to\mathbb{R}^3$ below:
Without doing any computation, derive the transformed standard basis vectors.
Solution. Since we are in $\mathbb{R}^3$, we will have $3$ standard basis vectors $\boldsymbol{e}_1$, $\boldsymbol{e}_2$ and $\boldsymbol{e}_3$. The transformed vectors are simply the columns of the transformation matrix: